
(Das Maßband ist nicht so ein kleines, sondern eines mit 8m)
Die Seile für eine Achse, sind an einem Stück Alu-rund befestigt.
Per Hand kann man so schon mal die Achsen bewegen.
Roboterarm mit roblink®-Gelenken von igus®
Zufällig hatte ich im Internet gelesen, dass die Firma igus®
ein neues Robotergelenk entwickelt und dafür noch Betatester sucht.
Link
Natürlich musste ich mich da gleich melden und nach ca. zwei Wochen hatte ich
das Teil im Haus.
Die Idee von igus® ist,
für die Mechanik von Robotern, eine Art Baukastensystem zu schaffen.
Dadurch soll den Entwicklern von Robotern, die zeitraubende Entwicklung von
Mechaniken abgenommen werden, um sich mehr auf die Programmierung des
Robotersystems konzentrieren zu können.
Das System ist auf Leichtbau ausgelegt und der Antrieb der Gelenke funktioniert
über Seilzüge. Dadurch können die Motoren konzentriert (z.B. im Fuss),
angeordnet werden.
Ich hatte ja schon einmal einen
Roboterarm aufgebaut und jetzt möchte ich es gerne mit diesem robolink®
-Gelenken probieren.
|
|
Mein erster Eindruck: Gar
nicht so klein wie gedacht. (Das Maßband ist nicht so ein kleines, sondern eines mit 8m) Die Seile für eine Achse, sind an einem Stück Alu-rund befestigt. Per Hand kann man so schon mal die Achsen bewegen. |
|
Gelenk von vorne. |
 |
 |
Zusammenlegen von Harmonicdrive®-Motoren
(von meinem alten Roboterarm) und Gelenk. |
|
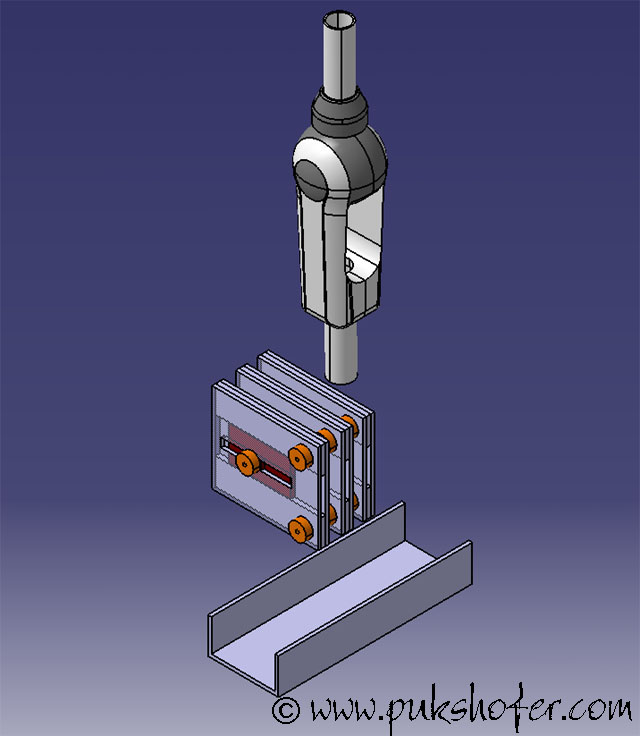
Erste Ideen per CAD und mit einem Spannsystem. |
 |
|
|
Erste Montage auf einem Alugestell und schon mit den
montierten Motoren. Die Seile sind auch schon gespannt. Als Rollen für die Seile, verwendete ich gleich das Alu-rund Stück, das an den Seilen montiert war. Die Rolle ist auf der gegenüberliegenden Seite vom Motor, noch mit einem Kugellager im Alu-U gelagert. Auf das Spannsystem habe ich vorerst einmal verzichtet. |
| Und hier nun der erste funktionierende Prototyp :-) |
|
|
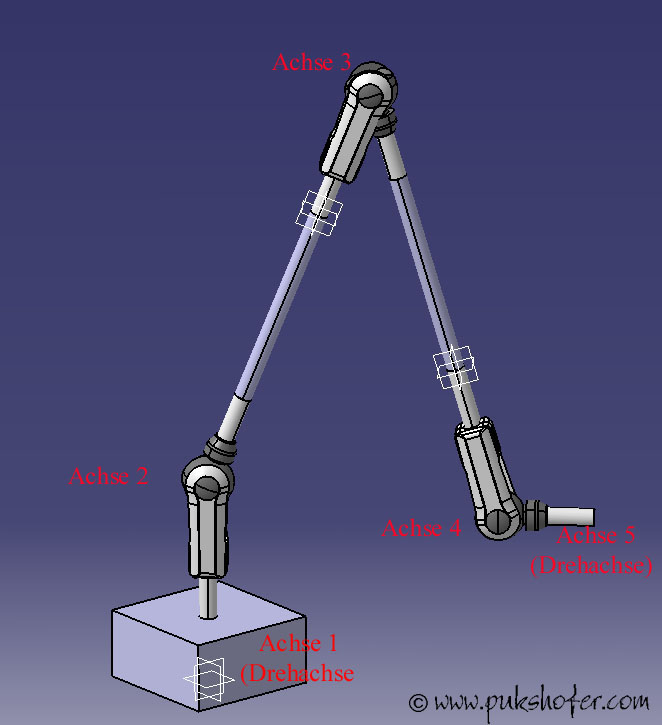
Nun geht es weiter mit dem Planen des Roboterarmes. |
 |
 |
Eine andere Möglichkeit wäre es, mit 4 Gelenken zu
probieren... Leider wird das so wieder aufwendiger, wackeliger und das Rohr ist auch nur auf eine bestimmte Menge von Bowdenzüge begrenzt. |
|
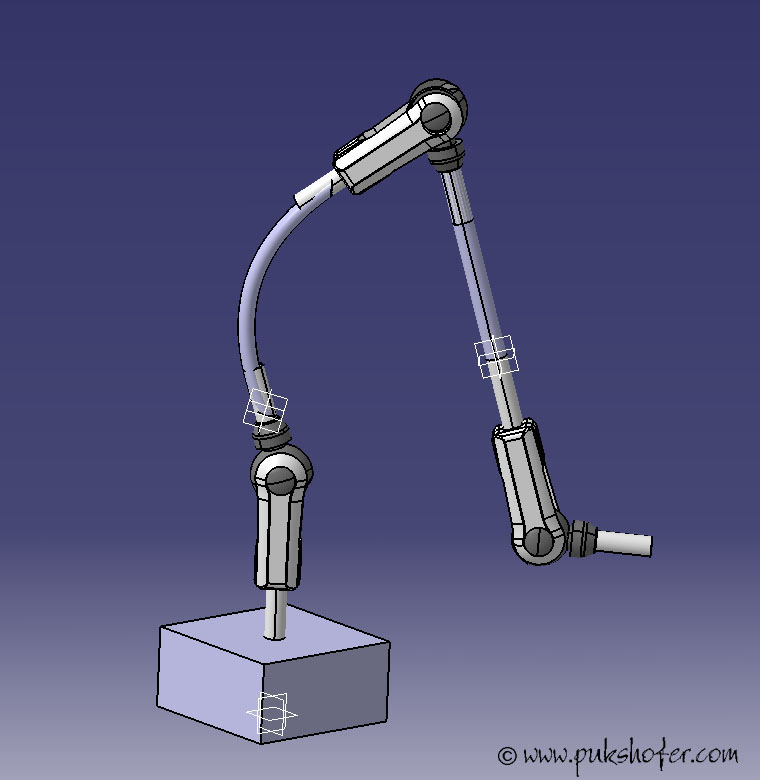
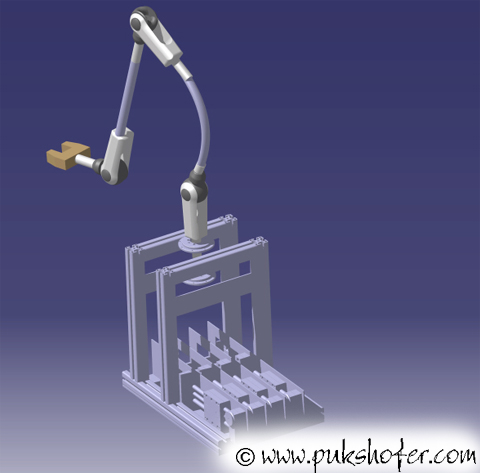
Neue Version vom ersten Entwurf. Den eingeschränkten Kipp-Winkel umgehe ich hier mit einem Bogen als Verbindungsrohr. Dadurch wird das Gelenk der Achse 3 schon ein wenig geneigt und ich komme so näher an den Fuß. :-) |
 |
 |
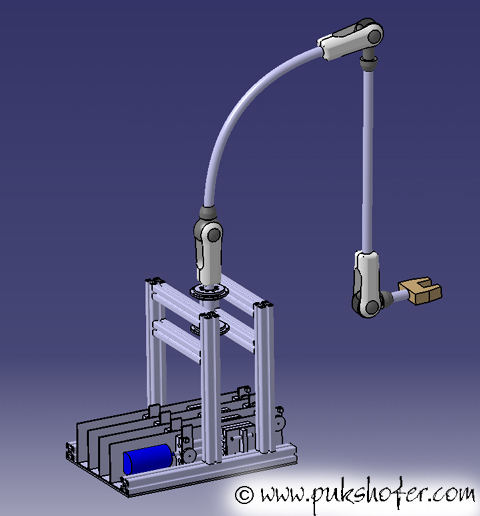
Erste Konstruktionsskizzen mit einem
Antriebssystem. Für die Seilzüge werden Lineareinheiten von igus® geplant, die jeweils auf einem L-Träger sitzen. ( insgesamt 4 Achsen) Als Drehgelenk für den Arm, sind Drehlager von igus® geplant. |
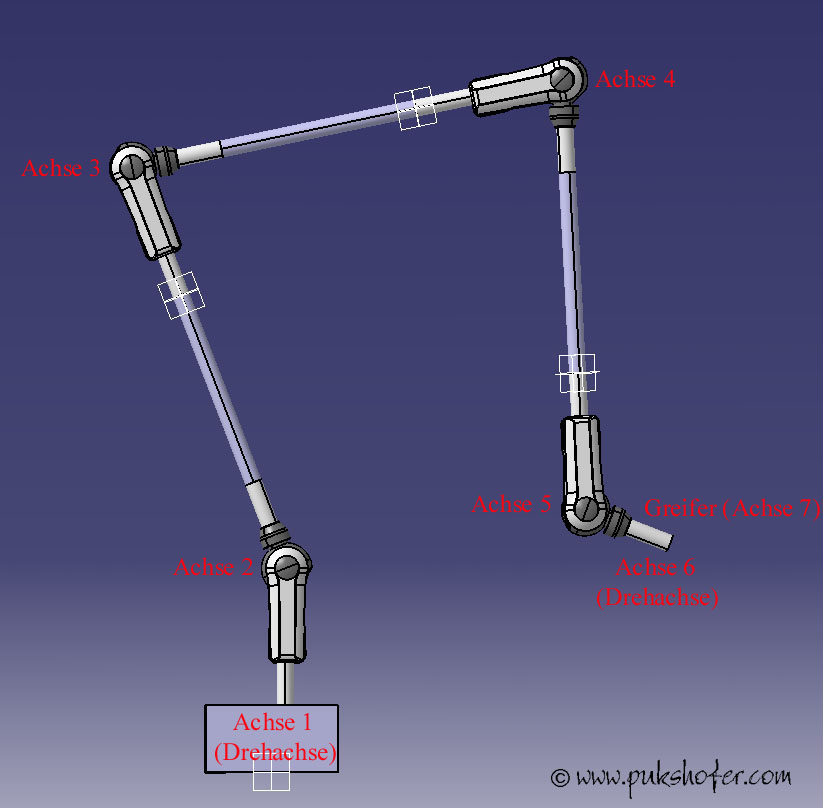
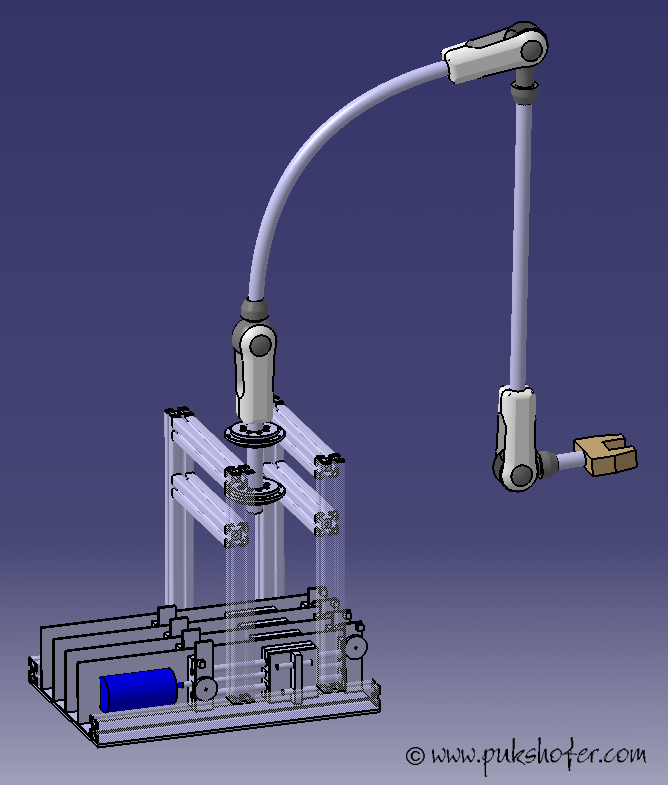
| Eine weitere Verbesserung. Jetzt sitzt der Arm über den Lineareinheiten. Die Bowdenzüge sollen dann bis an die Umlenkrollen der Antriebseinheiten kommen. Die Seile werden auf dem Schlitten mit Gewindehülsen gespannt. |
 |
 |
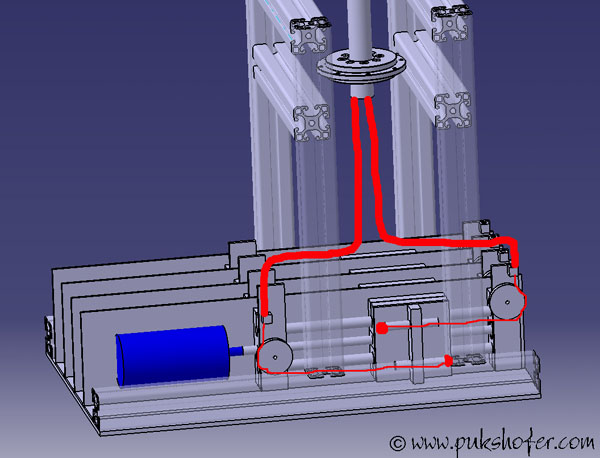
Habe wieder ein bisschen weitergezeichnet. |
| So in etwa sollen die Seilzüge laufen. Mit den Bowdenzüge bis nahe an die Linearführung und mit den Seilen dann über Rollen zu dem Linearschlitten. |
 |
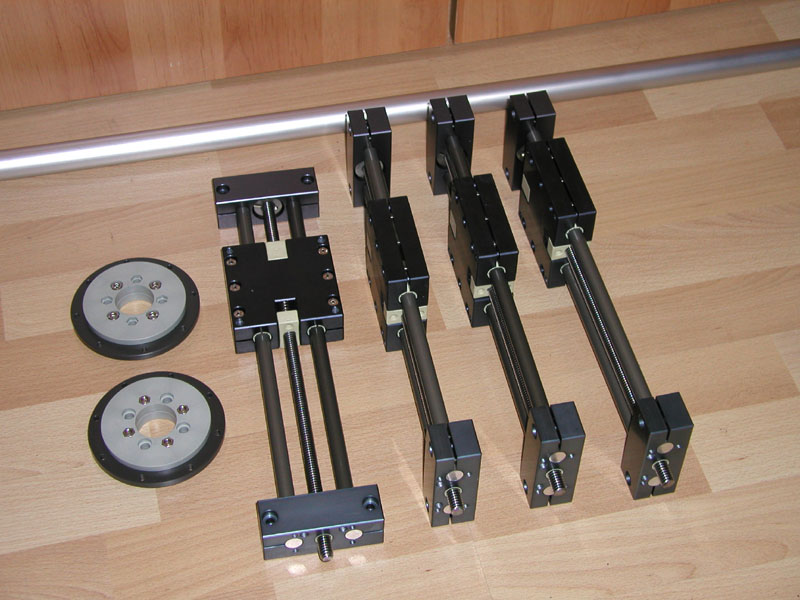 |
Heute sind die Teile von igus®
gekommen :-) Es sind 4 Linearführungen SHT |
wird fortgesetzt......
letzte Änderung: 15.04.2010
Zähler:
